
Original title: “Bubble Casting” on the cover of Nature: Princeton University develops a new type of soft robot

Researchers at Princeton University creatively invented the “bubble casting” method, which is a new method of using fancy “balloons” to make soft robots. These fancy balloons change shape in a predictable way when inflated. They use this method to design and create graspable “hands”, flapping “fish tails” and slender coils that can catch the ball.
On a certain day, they will be used to pick agricultural products, carefully grab items on conveyor belts, or provide personal care for humans. They may also be used in medical treatment, such as wearable rehabilitation kits, implantable devices that help the heart beat, etc.
Related research was recently published in the form of a cover paper in the internationally renowned journal “Nature” with the title “Bubble casting soft robotics”.
Traditional rigid robots have many uses, such as making cars. However, “they are inherently not suitable for interacting with soft things, such as humans or tomatoes.” said Pierre-Thomas Brun, the corresponding author of the paper.
Soft robots can use low-complexity, muscle-like soft actuators to complete complex tasks, such as gentle grasping, crawling or swimming. Its unique combination of softness and bionic motion makes it attractive in applications that cannot be achieved by rigid machines. force.
The actuator (ie, the component that causes the movement) of the soft robot can be bent, twisted, contracted, or stretched as needed. Unlike rigid robots that rely on joints to move in a fixed manner, the materials in soft robots have the potential to move and expand in an infinite variety of ways.
The booming field of soft robotics is driven by the latest insights in modeling, computing, and manufacturing, which enable the design, programming, and assembly of various soft machines. Although it has been proven that soft actuators can be braked using changes in chemical, magnetic field, electric field, temperature or humidity, the silicone rubber robot driven by a pressurized gap has attracted considerable attention due to its simple and fast driving method.
The movement of this robot is encoded in the shape or material of the actuator, so that changes in internal pressure can be mechanically converted into specific movements. In general, the expansion of these actuators is difficult to predict, so trial and error or long-term simulation are required to customize the shape of the actuator for a specific application. At present, the manufacturing process of actuators has limitations in scalability, design flexibility and robustness.
The “bubble casting” used in this work is a simple and flexible method that uses fluid physics to create actuators.
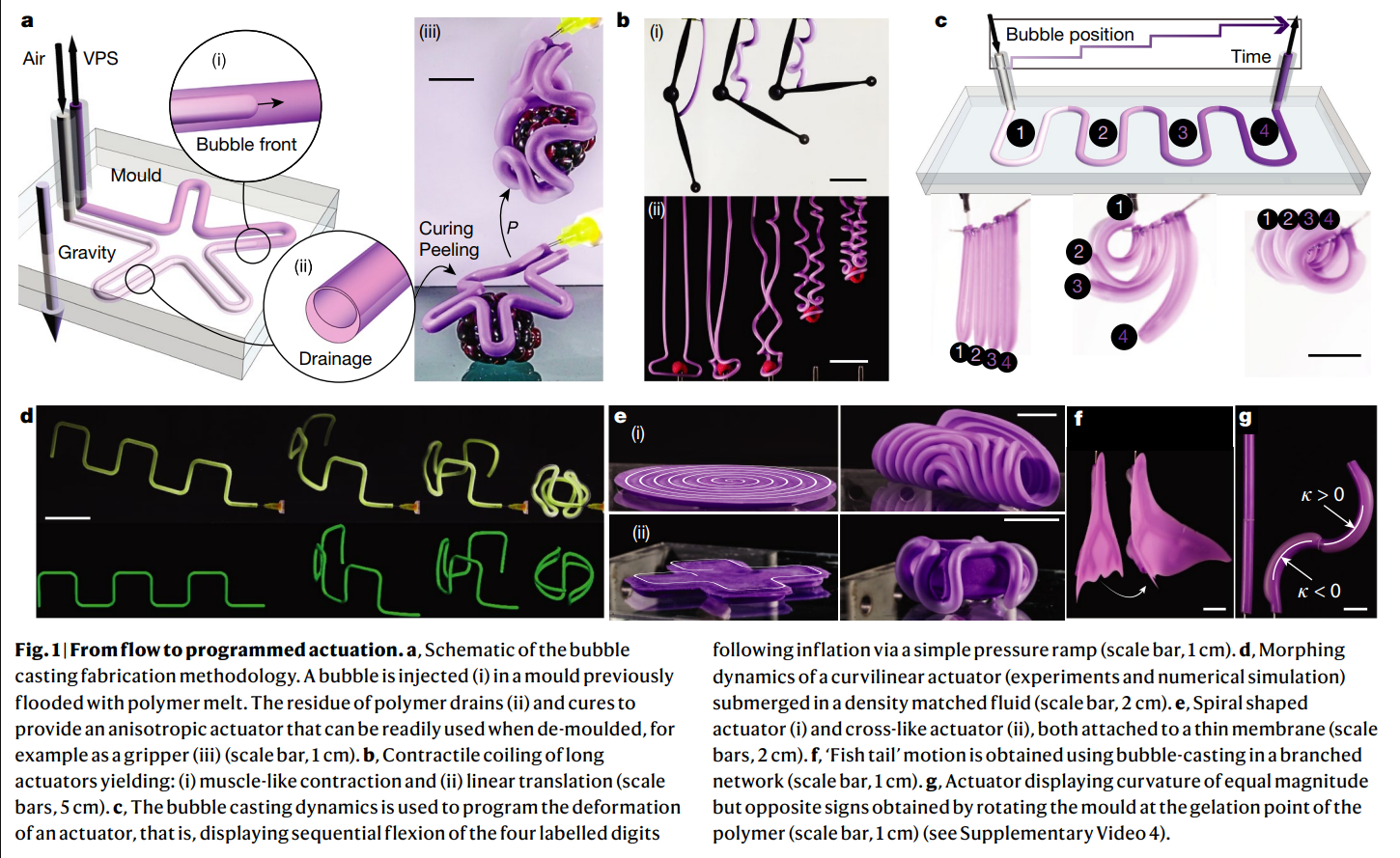
Specifically, researchers mainly use liquid polymers called “elastomers”, which after curing become a rubber-like elastic material. They fill this liquid into a simple mold, such as a straw, or more complex shapes such as spirals or flippers. Then, air is injected into the liquid to produce an elongated bubble, thereby forming the internal gap of the actuator.
Due to gravity, the bubbles slowly rise to the top as the elastomer drains to the bottom. Once the elastomer has solidified, it can be removed from the mold. Inflate with air to stretch and curl the thin surface with bubbles on the thicker base.
“If you allow more time to empty before solidification, the film on the top will be thinner. The thinner the film, the more it will stretch when you inflate it, which will result in greater overall bending.” First author Trevor Jones said.
By controlling the thickness of the elastomer applied to the mold, the speed at which the elastomer settles to the bottom, and the time required for curing, researchers can determine how the actuator will move.
They succeeded in creating a star-shaped “hand” that grasped the BlackBerry, coils that contracted like muscles, and even “fingers” that rolled up when the entire system expanded, just like playing a piano. These actuators deform when they are inflated.
One of the main advantages of “bubble casting” is that there is no need for 3D printers, laser cutters, or other expensive tools commonly used for soft robots. The system is also extensible. It is possible to make actuators as long as several meters and as thin as 100 microns.
The researchers said that they expect the flexibility, robustness and predictability of this method to accelerate the development of soft robots by assembling complex actuators (such as long, tortuous or vascular structures).
Despite its flexibility, this approach also has its limitations. For example, over-inflation can cause the balloon to burst. “Failure is quite catastrophic,” Jones said.
Next, the team will use the system to create more complex actuators and explore new applications.
They are interested in designing actuators that move together in continuous waves, like the feet of a crawling millipede. Another possibility is to create an actuator that manufactures a chamber that uses a single pressure source for inflation and can alternately contract and relax, thereby simulating the beating of the human heart.